GuitarMicBot
Automated Cartesian microphone positioning robot for systematic guitar amplifier recording experiments.
GuitarMicBot is a remote-controlled Cartesian robot for systematic microphone positioning in front of a guitar amplifier inside an acoustically isolated studio. It enables sound engineers to adjust microphone placement dynamically from their workstation without entering the recording space, supporting reproducible multi-position recording experiments.
The system uses V-Slot 2020 aluminium rails, NEMA 17 stepper motors with TMC2226 StealthChop drivers for near-silent operation, an ESP32-S3 microcontroller with Ethernet, and Open Sound Control (OSC) over UDP for real-time control. Total build cost approximately 535 PLN.
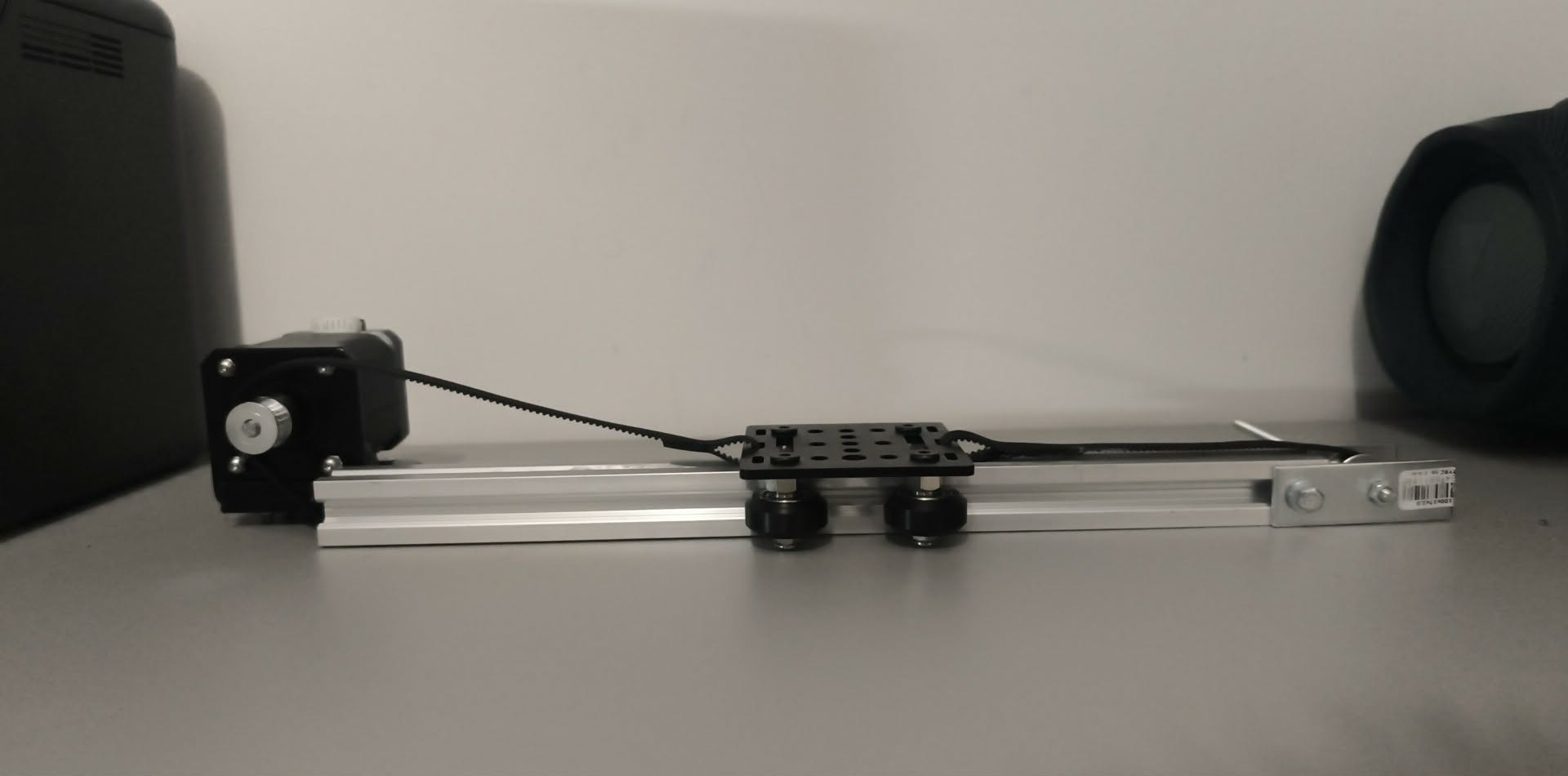
Linear rail assembly with stepper motor, belt drive, and sliding microphone carriage.

3D-printed microphone mount bracket on the carriage.
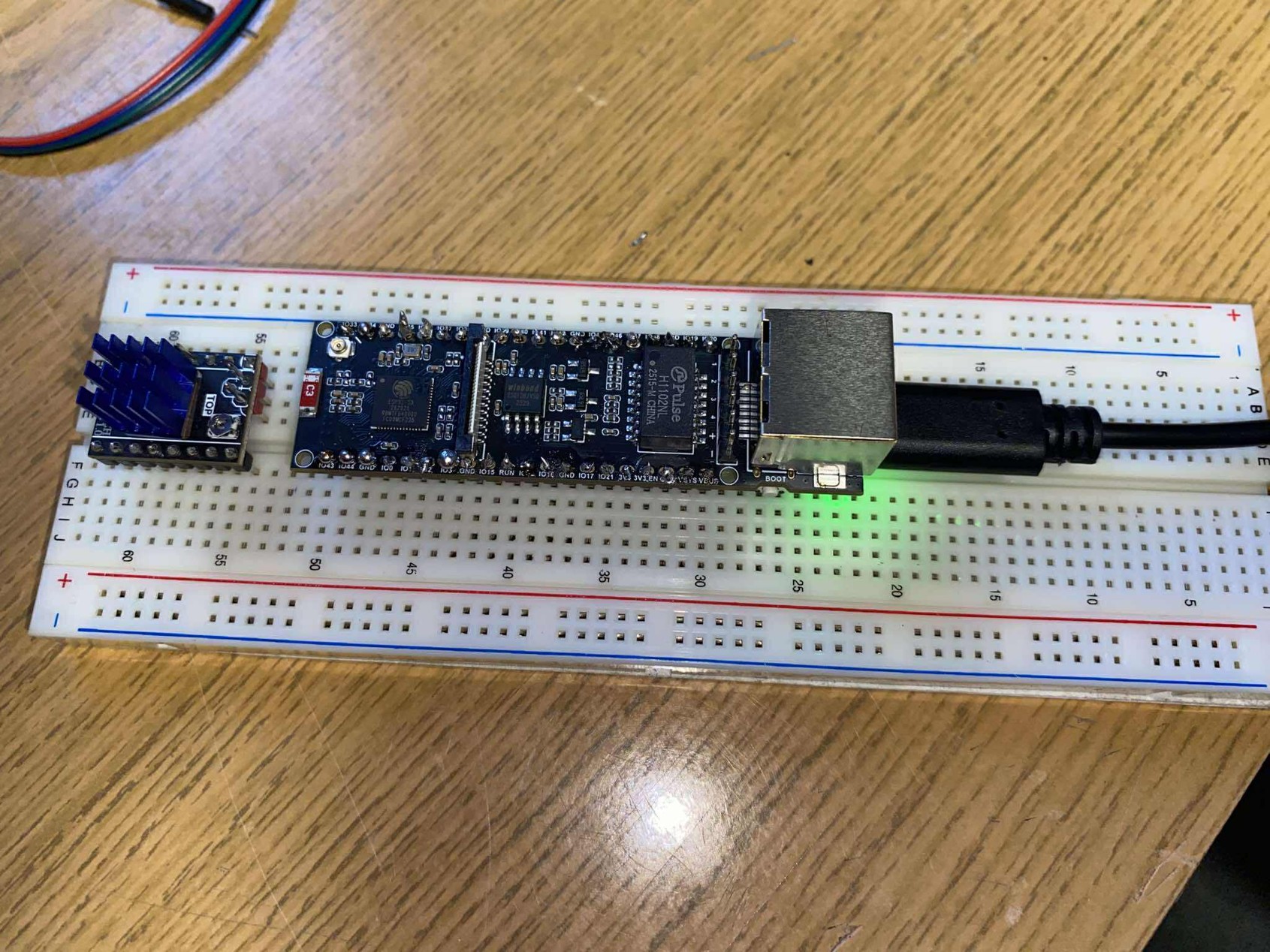
Control electronics on breadboard prototype.
Developed as a Student Group Projects course project (ID 431) at the Faculty of Electronics, Telecommunications and Informatics, Gdańsk University of Technology, by Jakub Mencel (lead developer), Mikołaj Dembowski (mechanical design), Jan Magierski (software), and Kamil Drażdżyński (electronics), under my supervision. Submitted to the AES 160th Convention Student Design Competition, Copenhagen, May 2026.