GuitarMicBot
Automated microphone positioning robot for systematic guitar recording experiments.
A robotic microphone positioning system for systematic close-miking experiments on acoustic guitar. The robot moves a microphone carriage along a motorised linear rail to precisely controlled positions, enabling reproducible studies of how microphone placement affects tonal character and frequency response.
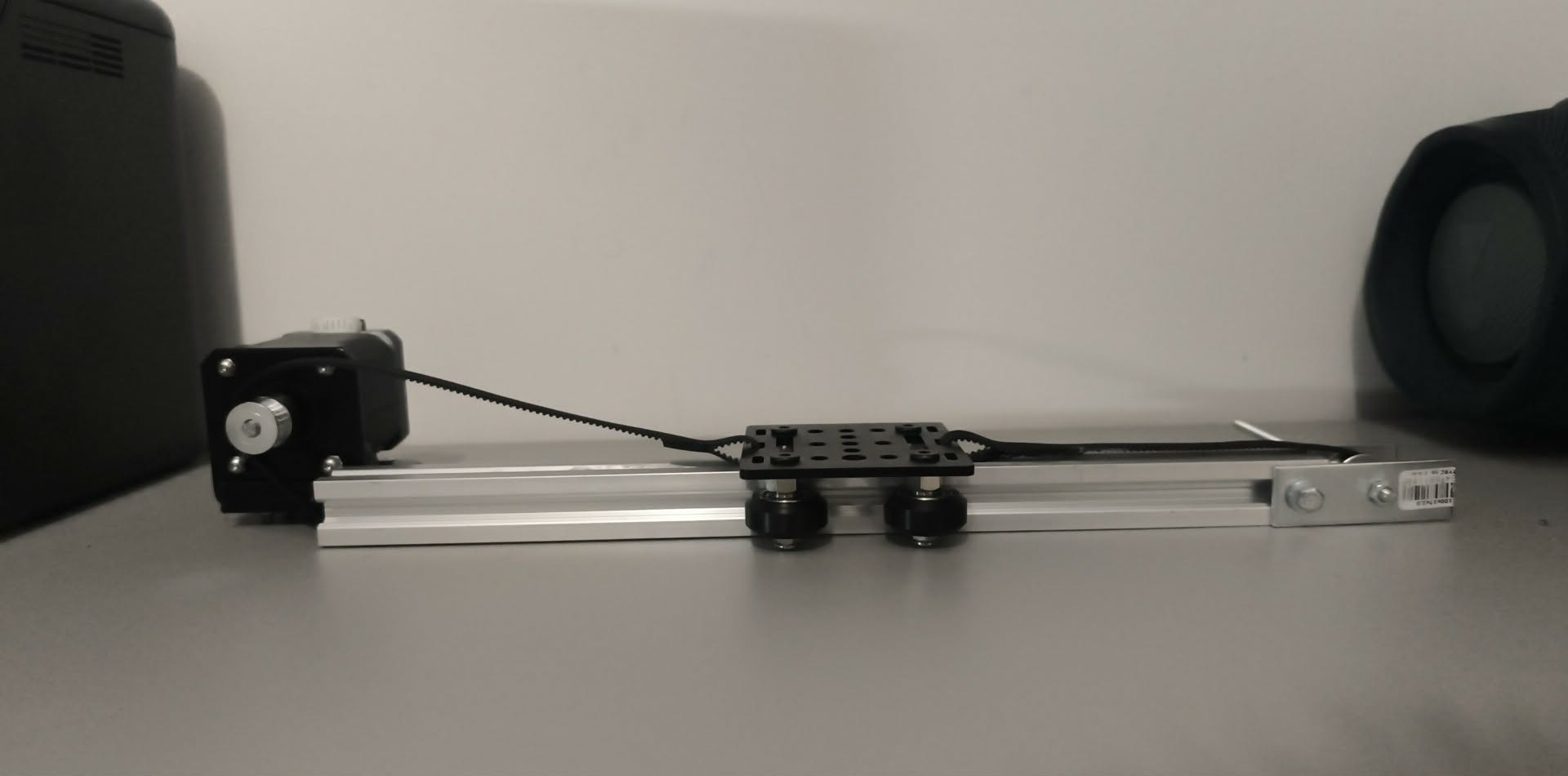
Linear rail assembly with stepper motor, belt drive, and sliding microphone carriage.

3D-printed microphone mount bracket on the carriage.
The control system uses a microcontroller with hardware Ethernet, receiving positioning commands via OSC for integration with DAW environments and automated measurement scripts. A companion VST plugin is planned.
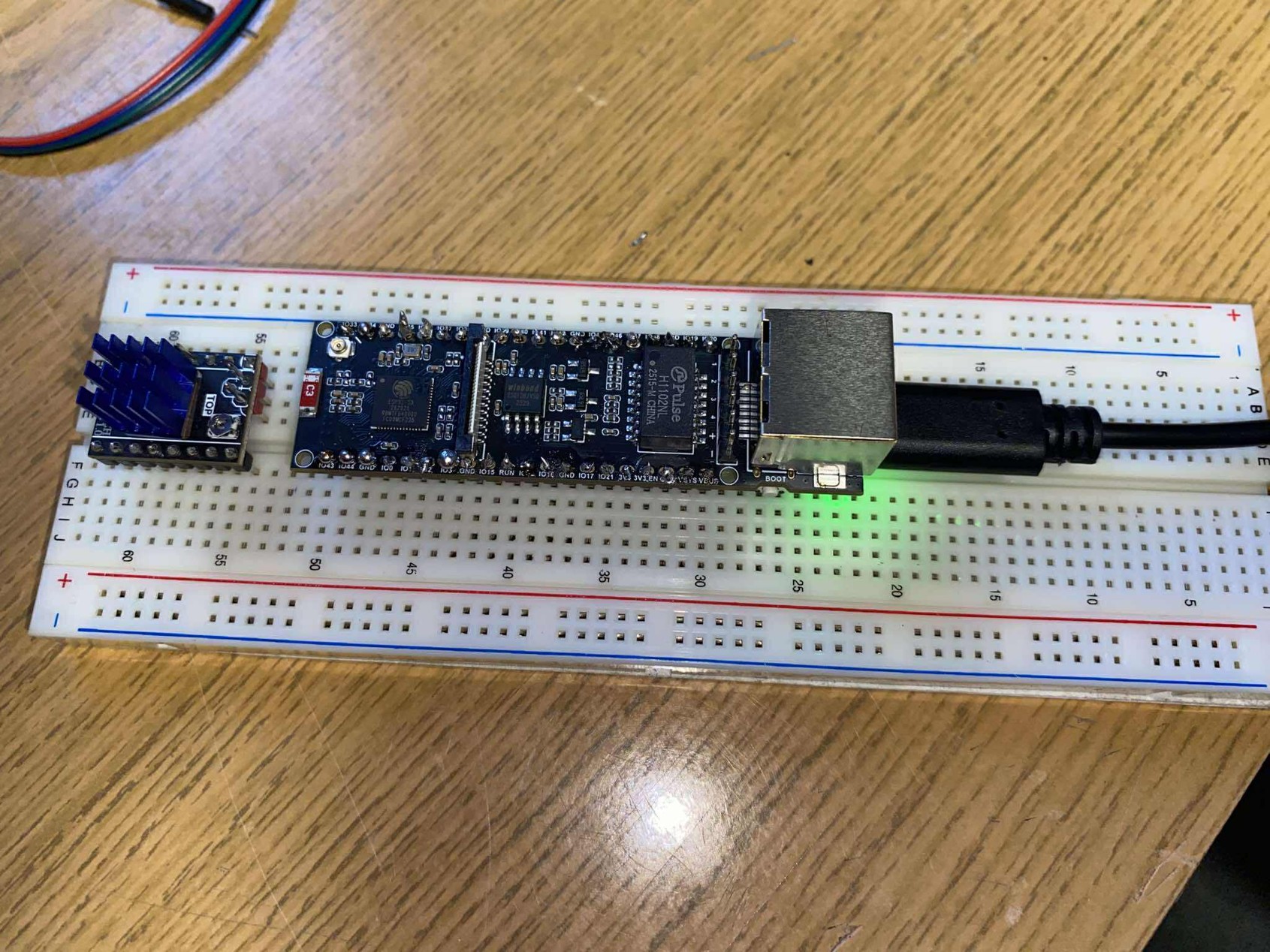
Control electronics on breadboard prototype.
Currently in active development. Student project led by J. Mencel, with K. Drążdżyński, J. Magierski, and M. Dembowski (KSMM 2025/2026).